Обновления 2017 (Расширенная версия)
Ключевые слова: пособие, печень, фиброз, хронические заболевания печени, гепатит, хронический вирусный гепатит, сдвиговолновая эластография, компрессионная эластография, алкогольный гепатит, НАЖБП.
Резюме
Мы представляем здесь первое обновление руководства EFSUMB (Европейская федерация ассоциаций по ультразвуку в медицине и биологии – European Federation of Societies for Ultrasound in Medicine and Biology) и рекомендации по клиническому применению эластографии, ориентированные на оценку диффузных заболеваний печени. Первая часть (расширенная версия) этого «Руководства и Рекомендаций» посвящена основным принципам эластографии и содержит обновленную информацию о том, как менялась технология. Описываются практические преимущества и недостатки, связанные с каждым из методов, а также даются рекомендации по оптимизации техники сканирования, отображения изображения, интерпретации изображений, представления данных и некоторых известных артефактов изображения. Вторая часть содержит клиническую информацию о практическом использовании эластографического оборудования и интерпретации результатов оценки диффузных заболеваний печени, а также анализирует основные результаты, основанные на опубликованных исследованиях, опираясь на данные метаанализа. Также обсуждается роль эластографии при заболеваниях печени различной этиологии и в нескольких клинических сценариях. Все рекомендации оцениваются с учетом их доказательной силы в соответствии с уровнями доказательности Оксфордского центра доказательной медицины. Этот обновленный документ призван служить справочным материалом и практическим пособием для начинающих и продвинутых клинических пользователей.
Введение
В этом руководстве, термин эластограмма относится к любому изображению любого эластичного свойства ткани. В этой статье также описываются невизуальные измерения таких характеристик в определенных зонах. Они называются точечными эластографическими методами. С другой стороны, эластометрия – это измерение эластичных характеристик ткани, которое может быть получено или с помощью методов визуализации, или без визуализации.
Основные принципы эластографии не изменились с тех пор, когда они были изложены в первой части оригинальных пособий EFSUMB и рекомендаций WFUMB по этому вопросу . Таким образом, этот документ призван обеспечить обновленной информацией о технологических изменениях с 2017 года в этой области, которая быстро развивается. Представленны достаточно краткие выводы, позволяющие понять этот документ без ссылки на более ранние данные, хотя цель заключается не в том, чтобы детально воспроизвести материал документа 2013 года.
Мы рекомендуем рассматривать эластографию, как тип удаленной пальпации, которая позволяет измерять и отображать биомеханические свойства тканей организма. Эти свойства связаны с упругими силами в тканях, которые восстанавливают их форму или объем после сжатия и противодействующие сдвиговой деформации*. Это представление объединяет различные типы эластографии и объясняет, почему они все отражают изображение контрастно, поскольку базируются на одной и той же информации, связанной с модулем сдвиговой жесткости, который описан ниже. Это подробно объяснено в , наряду с различными типами сдвиговой деформации. Сдвиговая деформация создается силой, приложенной или к точечной локализации или широко, через поверхность тела. Важно отметить, что переходные сдвиговые деформации будут распространяться как поперечные сдвиговые волны, что обсуждается ниже.
Сила может быть приложена путем нажатия или вибрации на поверхность тела, или с помощью естественного физиологического движения, или электронноуправляемым ультразвуковым датчиком для создания сфокусированной акустической радиационной силы (acoustic radiation force – ARF) на контролируемой глубине. Акустическая радиационная сила пропорциональна усредненной по времени интенсивности I звукового луча в месте толчка и амплитудного коэффициента поглощения α в месте толчка, обратно пропорциональна скорости звука cι в месте толчка, и увеличивается с каждым отражением или рассеиванием звука в зоне толчка. При отсутствии отражения или рассеяния, величина радиационной силы, действующей в каждой точке объема среды, равна F = 2αI / cι . Все ультразвуковые датчики обычно генерируют такую силу, но сила, интегрированная по длительности диагностического импульса (<2 мкс), слишком невелика, чтобы генерировать смещения, пригодные для измерения. В лучах, предназначенных для создания акустической радиационной силы, пригодной для измерения сдвига, используют специально длиннее импульсы (50-1000 мкс). Это создает сдвиги ткани на микронном уровне.
Все доступные методы ультразвуковой эластографии (рис.1) используют ультразвук для измерения сдвиговых деформаций внутренних тканей, возникающих в результате приложенной силы. Важным является тип силы (рис 1, столбец 2). Если сила меняется медленно относительно времени распространения сдвига до необходимой глубины, как это имеет место при компрессии датчиком или физиологическом движении тканей, она считается квазистатической. Трудно получить изображения, которые отражали бы количественно свойство ткани с использованием квазистатической приложенной силы, хотя возможна количественная оценка относительно эталонной ткани или материала фантома.
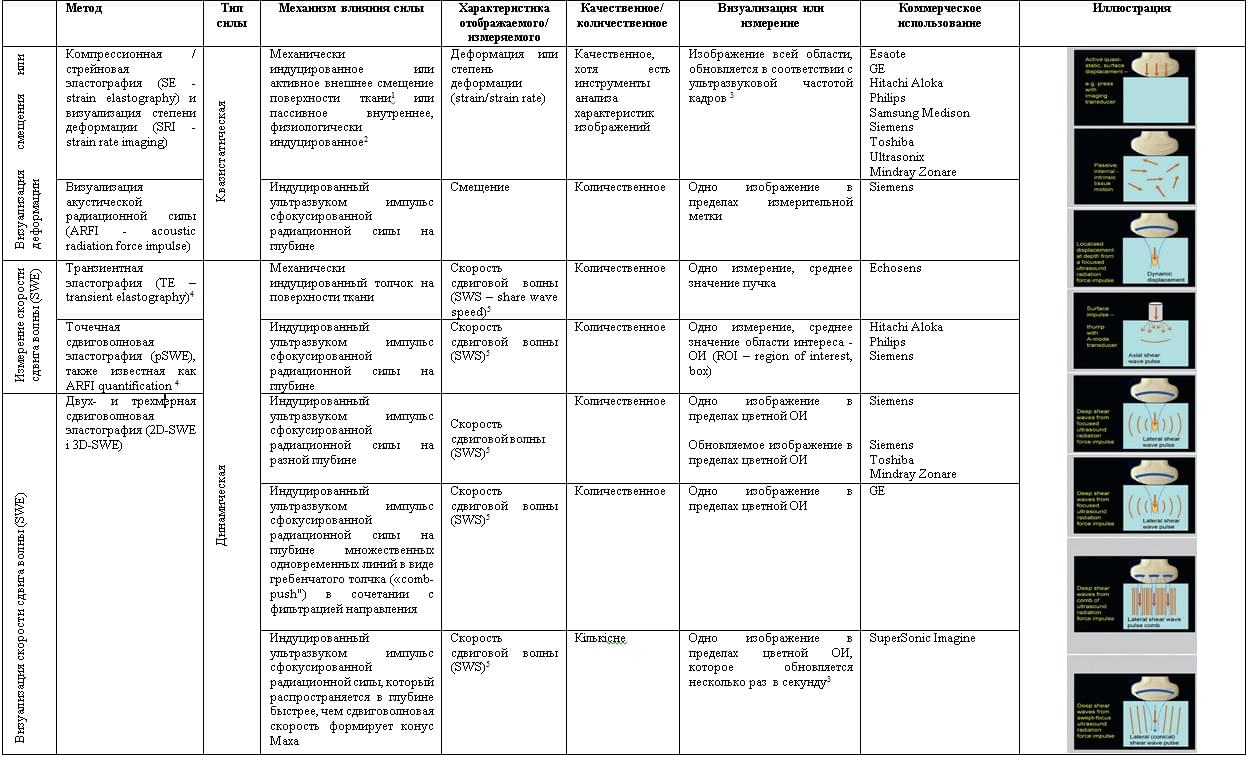
Рис.1. Типы эластрографии, которые описанны в данной статье.
1 – пальпация на поверхности тела.
2 – кардиоваскулярная или дыхательная пульсация (физиологически индуцированные смещения тканей).
3 – термина «реальное время / real time» мы избегаем, по эластографии в реальном времени, так как эластографические системы, которые описываются в этой статье, не подходят ни для быстрого исследования больших объемов, ни для беглого осмотра движения ткани на серии эластограмм.
4 – термин «сдвиговолновая эластография» (SWE – share wave elastogrsphy) используется согласно данным литературы, и относящийся к методам, которые генерируют изображение с помощью импульса сфокусированной акустической радиационной силы. Это включает 3D-SWE и 2D-SWE. Точечная сдвиговолновая эластография (pSWE) характеризуется определением точечной средней (без картинки) скорости сдвига волны за счет импульса радиационной силы. Подчеркиваем, что это отдельный метод SWE, в литературе названый как количественное ARFI. ТЭ – транзиентная эластография также измеряет скорость сдвиговой волны (SWS – share wave speed), без формирования изображения, и классифицируется здесь, как SWE.
5 – SWS может быть выраженна в виде или сдвигового модуля G, или модуля Юнга E, исходя из предположений, которые объясняются в данной статье.
Динамические силы допускают абсолютную количественную оценку свойств ткани. Они включают в себя импульсы и непрерывные вибрации, которые могут проводиться механически на поверхности тела или глубоко внутри тела с использованием силы акустического радиационного давления. На рис. 1 показано только импульсныединамические силы, так как имеющиеся коммерческие ультразвуковые системы с эластографией, по-прежнему не используют непрерывно вибрационную энергию, хотя есть примеры в литературе, в опубликованных исследованиях по ультразвуковой эластографии .
Обработка сигнала внутри сканера для всех современных коммерческих ультразвуковых эластографических методик начинается с измерений смещения тканей, как функции пространственного расположения и времени, с использованием кросс-корреляционного трекинга, допплеровского или иного способа обработки. Различные методы эластографии отличаются друг от друга тем, что они обрабатывают эти данные измерений смещения тканей для создания эластогрфических изображений (собственно эластографии) или измерения эластичности (эластометрии). Существуют три варианта отображения свойств ткани (Рис.1, столбец 4):
а) Отображение смещения без дальнейшей обработки (Рис.1, строка 2), как при формировании изображения на основе силы акустического радиационного давления (ARFI). Смещение ткани связано со сдвиговой деформацией. Чем больше сила, тем больше смещение, но более жесткие ткани смещаются в меньшей степени, чем мягкие ткани. Жесткость определяется как сила, приложенная к ткани, деленная на смещение ткани, которое возникает. Если предполагается, что сила (обычно количественно не известна) одинакова для всех зон на изображении, можно предположить, что изображение сдвига является обратной картой относительной жесткости (она является обратной, потому что чем жестче ткань, тем меньше смещение). Обратите внимание на то, что жесткость определяется не только механическими свойствами ткани, но также и геометрическими факторами, такими как площадь поперечного сечения образца ткани, к которому применяется сила. Хотя само смещение является количественным, яркость изображения обычно соотносится со шкалой в относительных качественных категориях между мягким (ярким) и твердым (темным).
в) Отображение деформации или степень деформации ткани (на рис. 1, строка 1), которая рассчитывается по пространственному градиенту смещения или скорости, соответственно, как при стрейновой/компрессионной эластографии (SE – strain elastography). Смещение изображений работает хорошо, когда четко локализованые силы применяются на глубине, как при визуализации ARFI. Однако когда сила приложена к большой области поверхности тела, напряжение ткани обеспечивает лучшее измерение деформации, потому что, в отличие от смещения, оно не уменьшается с глубиной. Модуль Юнга Е является истинным свойством ткани, которое измеряется осевым сжатием образца ткани относительно его общей площади поперечного сечения вдоль его длины. Он равен приложенному напряжению σ, разделенному на измеренную деформацию ε, так называемый известный закон Гука Е = σ / ε, где напряжение является приложенной силой на единицу площади, а деформация – изменение длины образца, деленная на его исходную длину. Если предполагается, что напряжение (обычно не известно) одинаково для всех изображений, изображение деформации можно рассматривать как обратную относительную карту модуля Юнга (оно является обратным, поскольку чем выше модуль Юнга, тем меньше деформация). Хотя сама деформация является количественным измерением (единица в%), яркость изображения обычно распределяется по шкале относительными категориями между мягким (ярким) и твердым (темным).
с) Отображение скорости сдвиговых волн (SWS – share wave speed) (Рис.1, строки 3-7), вычисляется с использованием данных сдвига во времени для измерения промежутка времени от момента генерации до появления сдвиговой волны в различных зонах. Все подобные методы сгруппированы под общим термином сдвиговолновой эластографии (СВЭГ, SWE – share wave elastography), и включают в себя: транзиентную эластографию (TE – transient elastography), точечную сдвиговолновую эластографию (рSWE – point SWE) и многомерную сдвиговолновую эластографию (2D-SWE и 3D-SWE).
Это возможно только тогда, когда сила приложена динамично. Сдвиговая деформация, возникающая локально и мгновенно в ткани, распространяется как сдвиговая волна, до тех пор, пока не будет полностью ослаблена по ходу ее перемещения, достигает удаленного местоположения через некоторое время, которое определяется как скорость сдвиговой волны – cs. Скорость сдвиговой волны может отображаться в единицах мс-1. В качестве альтернативы, предполагая, что она не меняется в зависимости от величины или частоты приложенной силы, или от положения и направления в ткани, cs может быть преобразована или в модуль Юнга Е, или в сдвиговой модуль G с использованием уравнений Е = 3ρcs2 и G = E/3 (предполагая, что ткань является несжимаемой, где ρ – плотность ткани. Внимание! Оба модуля E и G выражаются в одинаковых единицах килопаскалях (кПа). Выбор того, отображать скорость СВ в м/с или модуль в кПа, может зависеть от желания пользователя, или такой выбор может быть недоступен (иногда определяется регулирующими органами для конкретного региона, в котором сканер или измерительная система изготовлены или проданы).
Пояснение: В литературе по магнитно-резонансной эластографии (МРЭ, MRЕ типично представлены данные о сдвиговом модуле G, тогда как в литературе по ультразвуковой эластографии, чаще всего приводятся значения для модуля Юнга Е. Читателю следует быть осторожным при сравнении данных по опубликованным статьям, так как обе величины выражены в одних и тех же единицах (кПа) и E = 3G. При публикации результатов исследований важно указать, какой модуль был измерен при использовании единиц кПа, избегая неспецифических терминов, таких как жесткость, и необходимо сказать, как он был рассчитан.
Причины, по которым ультразвук может использоваться для получения эластограмм.
Ультразвук – это распространение кратковременной деформации плотности. В мягких тканях он движется со скоростью 1350-1600 мс-1, тогда как сдвиговая деформация идет значительно медленнее, в диапазоне 1-10 мс-1 . Эта разница в скорости означает, что ультразвук может использоваться для измерения смещений ткани в точных фазах сдвиговой деформации. Ультразвук имеет также относительно небольшое затухание, позволяет проводить измерения смещений с высоким разрешением в несколько микрон на глубине нескольких сантиметров. Кроме того, спекл в ультразвуковых изображениях позволяет измерять перемещения ткани, даже когда нет четко дифференцированных тканевых структур для трекинга.
Подробнее на сайте источника: https://rh.ua/ru/statti/rukovodstvo-rekomendacii-efsumb-po-klinicheskomu-ispolzovaniyu-ultrazvukovoj-elastografii-pecheni/
 Форум
Форум









Комментариев еще нет